
Avant de nous lancer dans la construction d’une CNC remplaçant la Charly Robot que nous utilisions. Nous avons voulu réparer la petite Roland® Modula MDX-15 qui faisait partie de notre héritage mais dont l’électronique était hors service.
 Pour cela, ne pouvant réparer la carte d’origine – aucun schéma disponible – ni investir les 500 CHF demandés par son constructeur pour son remplacement, nous avons décidé de nous lancer dans l’assemblage de composants standards pour lui redonner vie.
Pour cela, ne pouvant réparer la carte d’origine – aucun schéma disponible – ni investir les 500 CHF demandés par son constructeur pour son remplacement, nous avons décidé de nous lancer dans l’assemblage de composants standards pour lui redonner vie.
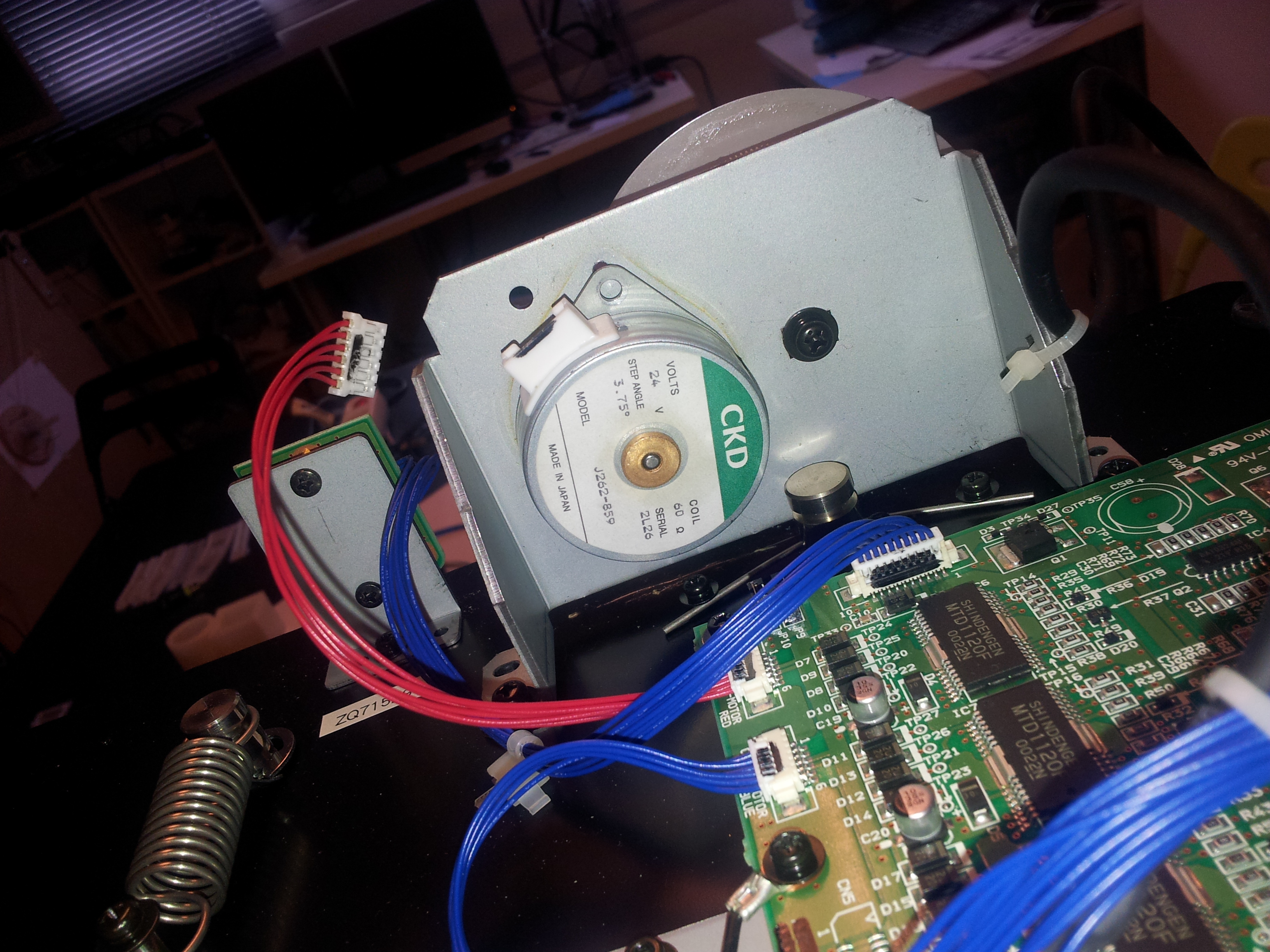
La difficulté est liée au fait que les moteurs de cette machine ne sont pas courants (CKD J262-859) et ont été développés spécifiquement pour Roland®.
Le choix qui s’impose est d’utiliser un Arduino avec le firmware grbl.
Pour cela, le circuit de protoneer.co.nz, 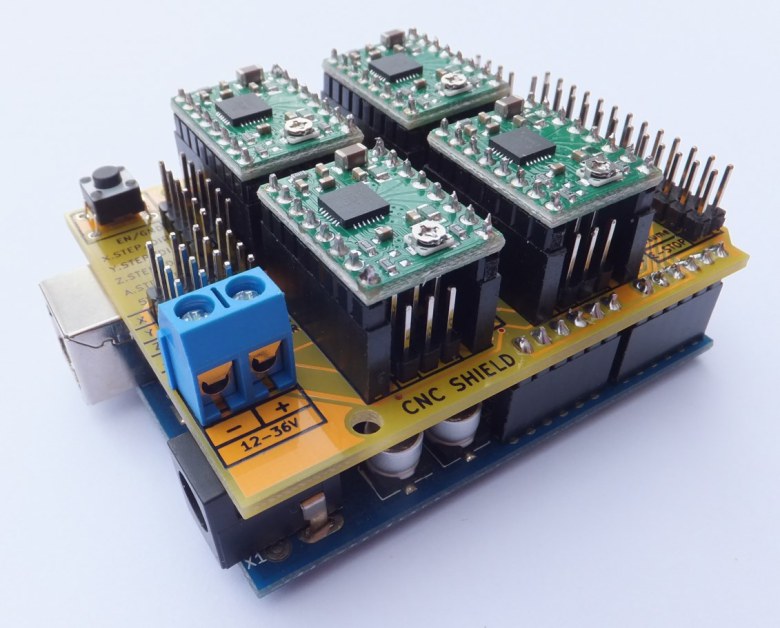
est fait pour nous faciliter la vie…
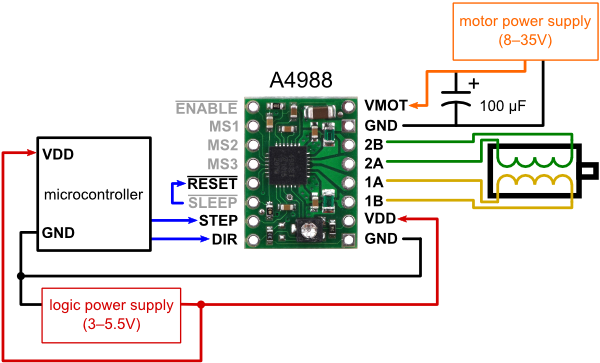
Nous avons choisi 3 interfaces de puissance Pololu A4988.
Avec Paul-André, il n’a pas été difficile de brancher les moteurs, par contre nous avons dû tâtonner pour arriver à trouver une configuration des pilotes qui convienne. Nous la publierons quand nous l’aurons mise à l’épreuve.
Jonathan a câblé des fins de course qui ne sont pas présents sur la machine. La broche est animée par un modèle de moteur Sagami tout aussi exotique et spécifique que les moteurs pas-à-pas.
La dernière version du grbl 0.9i, nous permettant d’utiliser une sortie PWM de l’Arduino Uno [#define VARIABLE_SPINDLE], nous en avons profité pour concevoir un petit montage avec Mosfet pour le faire tourner. Là encore nous publierons tout le câblage une fois la mise à l’épreuve convaincante ! (Le circuit de protoneer V3.03 , n’est pas tout à fait en phase avec la configuration de grbl nécessaire pour utiliser cette fonction).
Nous en sommes aux premiers tests des fin de course et de leur bonne gestion par le firmware.
A suivre …